I enjoy tinkering around with robots and electronics. Bridging the invisible world of software with the real world of physical things.
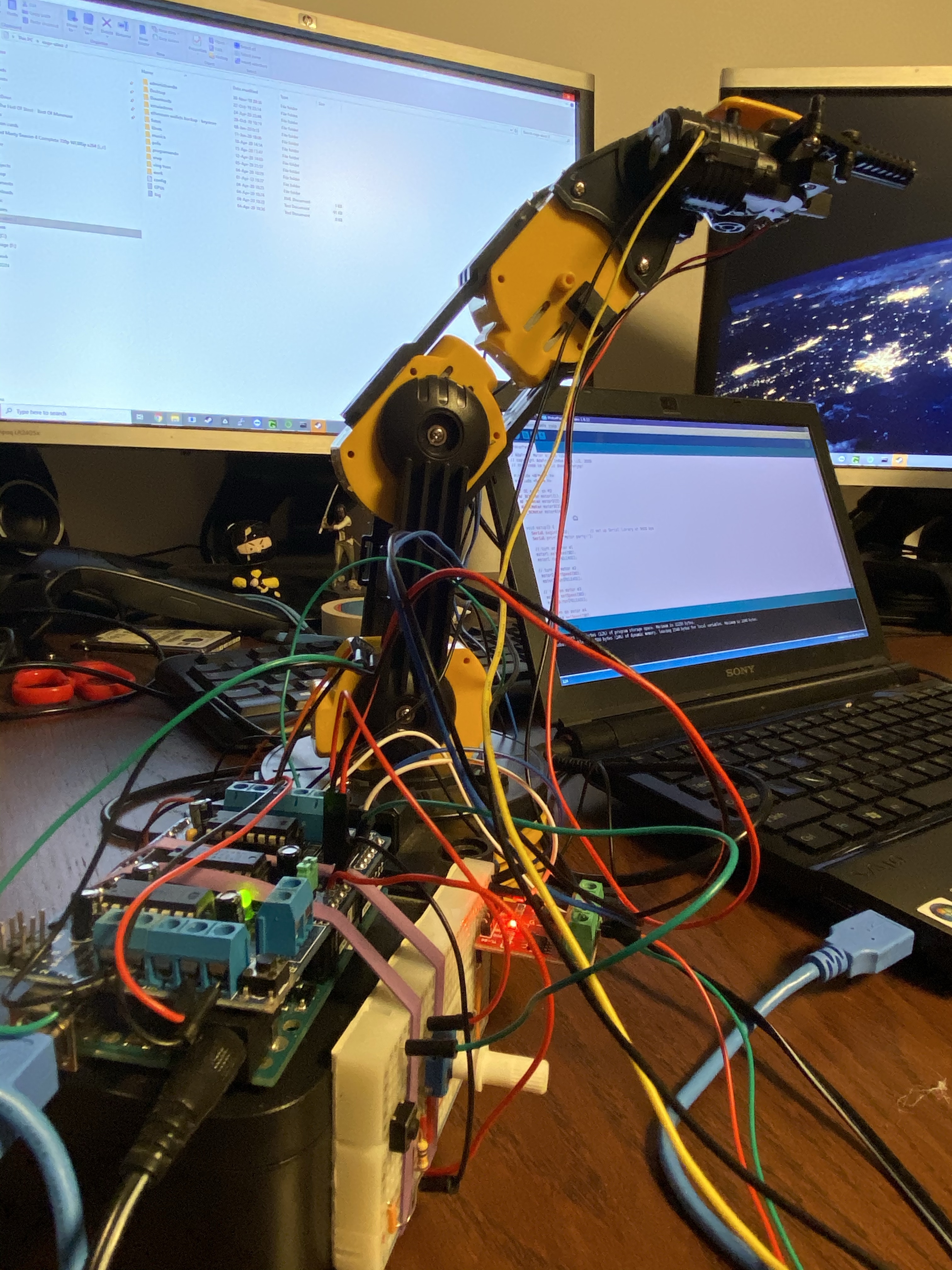
I discovered I could glue a breadboard to the side of the base of this robotic arm, and that I could hold the arduino board to the base with elastic bands. and that the adafruit motor board left 5 analog pins free to use, and that I could put a switch, a potentiometer and an hbridge in the breadboard with these five free pins. And that I could substitute the broken led with a new one with my soldering iron 😀
It is now all ready and working. Every time I hold down the switch button it activates one of the five motors iteratively. With the potentiometer I can have the motor run in one direction or the other. And the LED at the hand of the robot arm shines while the button is pressed.
The only problem pending is I need to change all the worn out gears from the motors as they are eroded from previous experiments (the problem with dc motors as opposed to servo motors is that you can’t know where they are, so I overextended them eroding the gears)